Engineering Portfolio
Projects
Selected technical projects, prototypes, and engineering work

Web Development Portfolio – Academic, Research, Organizational, and E-Commerce Websites
A collection of six websites I designed, developed, launched, or actively contributed to, including research lab websites, organizational platforms, personal academic websites, and an e-commerce web application.
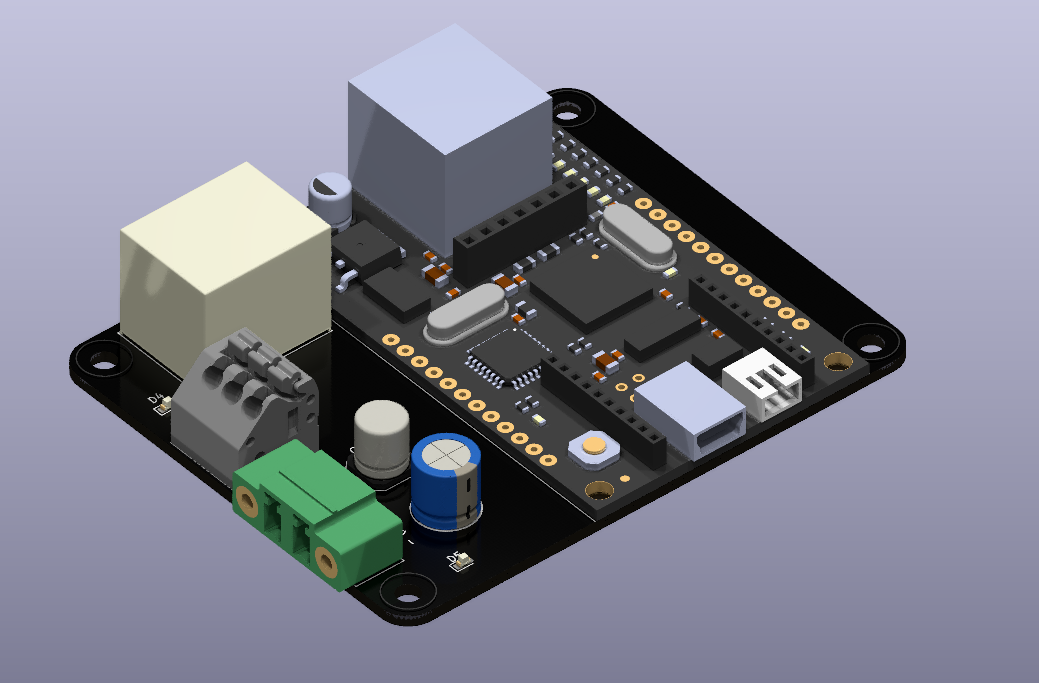
PCB Design Portfolio – Embedded Hardware, Robotics, and Power Electronics Boards
A portfolio of PCB design work including embedded control boards, robotics hardware, sensor interfaces, motor drivers, PEM electrolyzer drivers, and prototype electronics developed from schematic design to 3D visualization and fabrication.
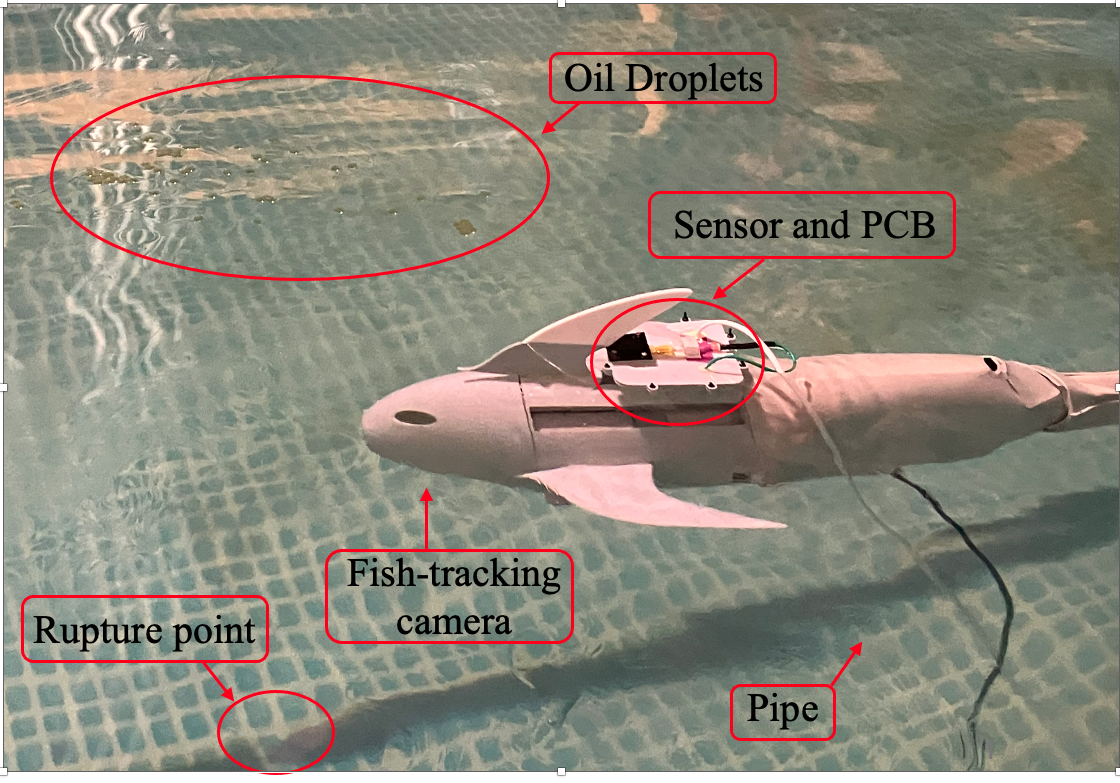
Bio-inspired Robotic Fish Enabled Oil Spillage Monitoring
Development and experimental testing of a bio-inspired robotic fish integrating an OECT-based sensor package for mobile oil-spillage monitoring near submerged pipelines.
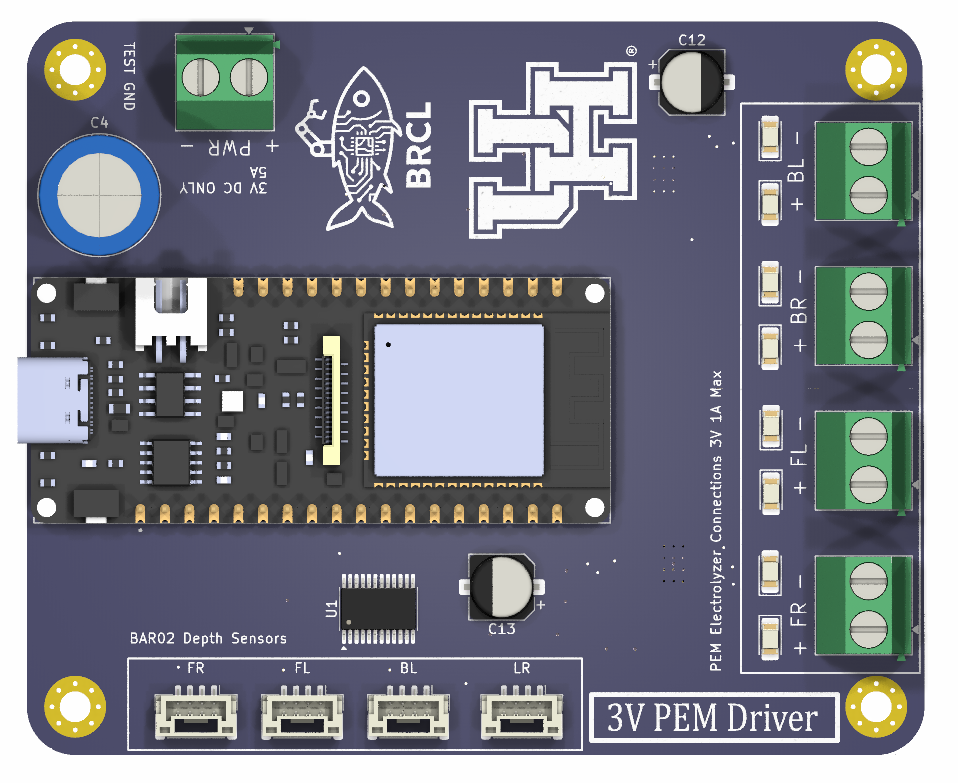
Low-Voltage Driver PCB for Four PEM-Electrolyzer BCDs
A custom PCB designed to operate four low-voltage PEM-electrolyzer buoyancy control devices and interface with four depth sensors for underwater robot depth and orientation control experiments.
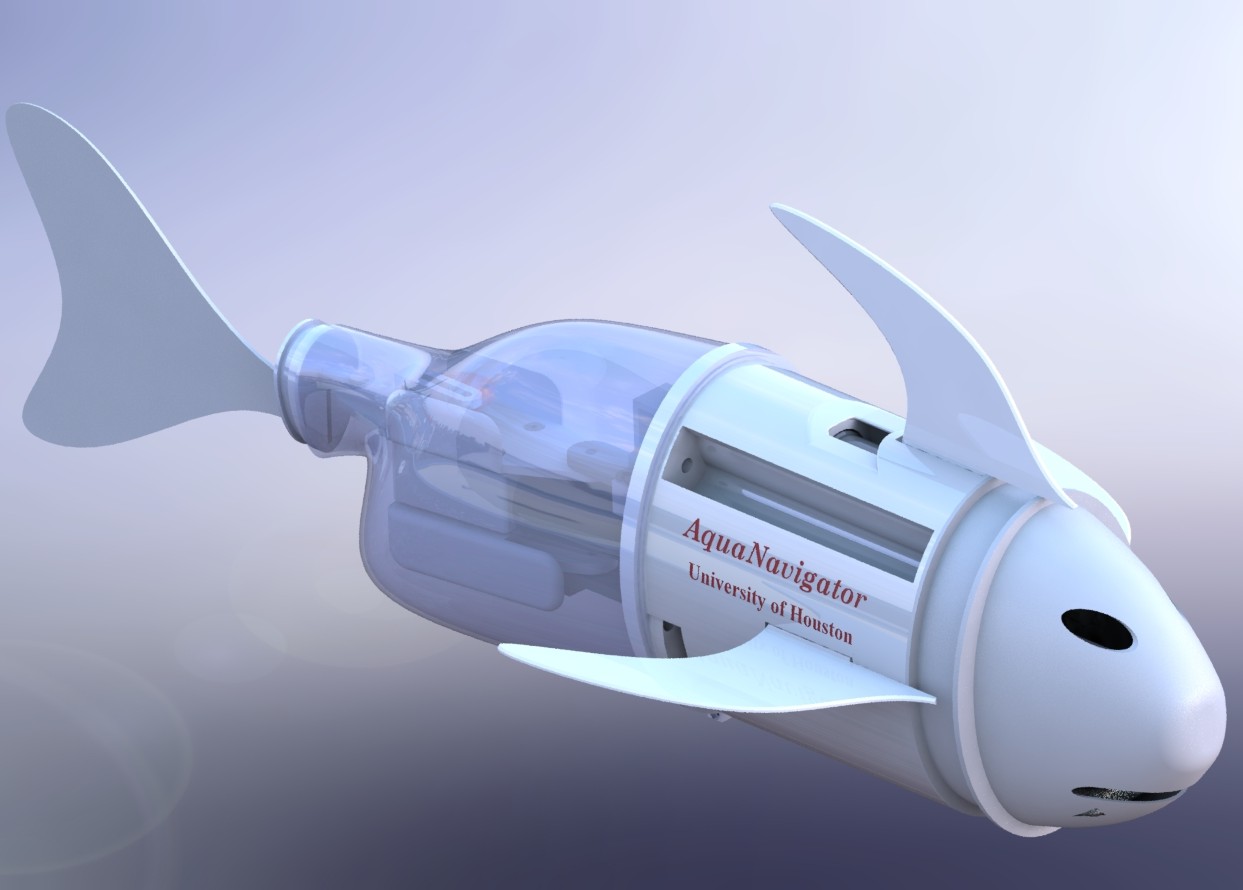
Bio-Inspired Robotic Fish for Underwater Pipeline Tracking
This project focuses on the design, development, and control of a bio-inspired robotic fish for underwater pipeline tracking and monitoring applications.
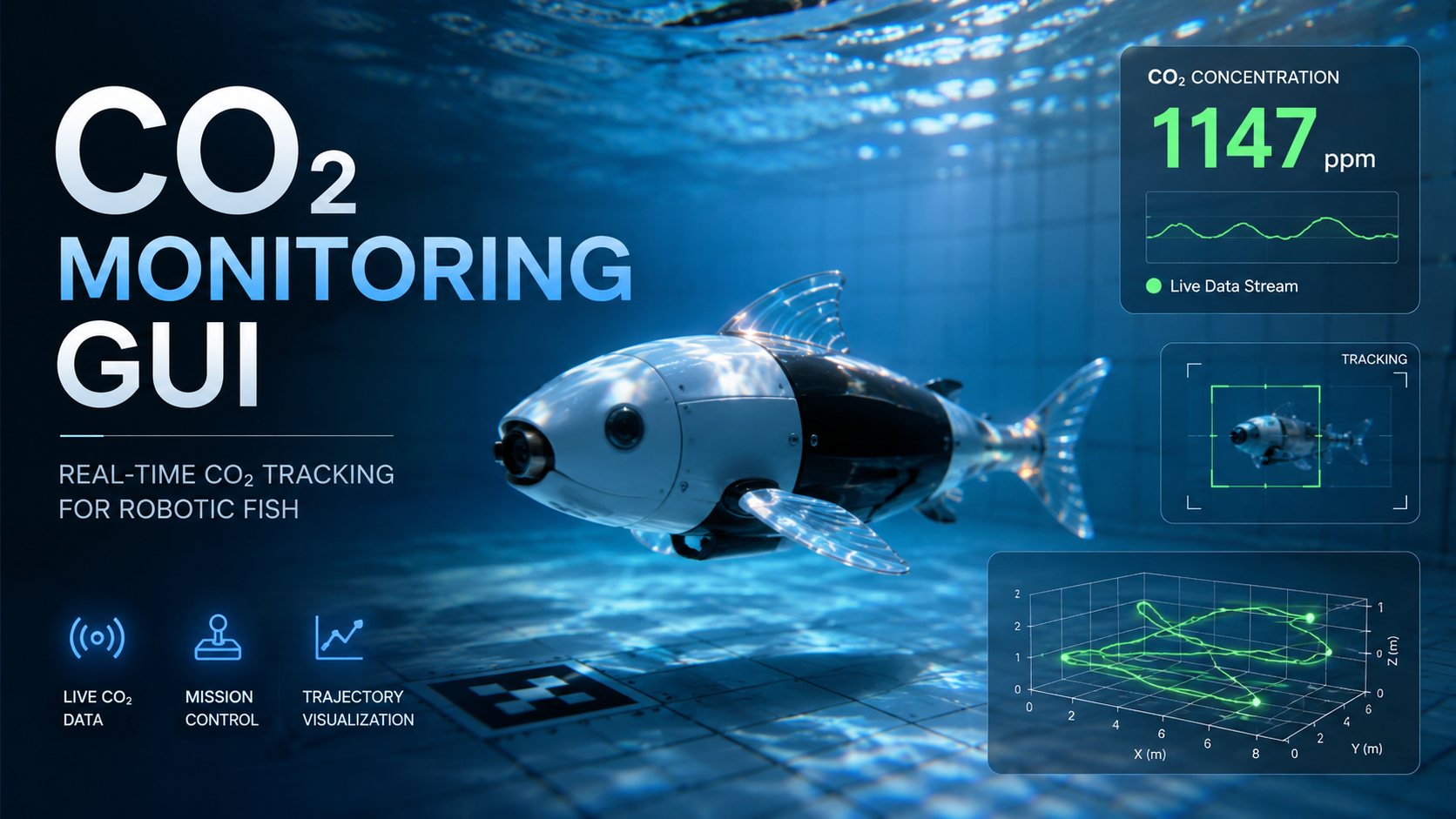
CO2 Monitoring GUI for Robotic Fish Experiments
A custom Python-based GUI developed for real-time CO2 monitoring, robotic fish control, live camera tracking, and 3D trajectory visualization during underwater experiments.
Development and Azure Deployment of the BRCL Lab Website
A full-stack lab website for the Bio-inspired Robotics and Controls Lab, developed using ASP.NET Core on .NET 9.0 and deployed on Microsoft Azure with a custom content-management workflow.

CAD Design of an IP68 Linear-Actuated Buoyancy Control Device
A mechanical CAD design of a compact variable buoyancy control device using an IP68 linear actuator, developed to support stronger experimental hardware for underwater robotics and control research.